
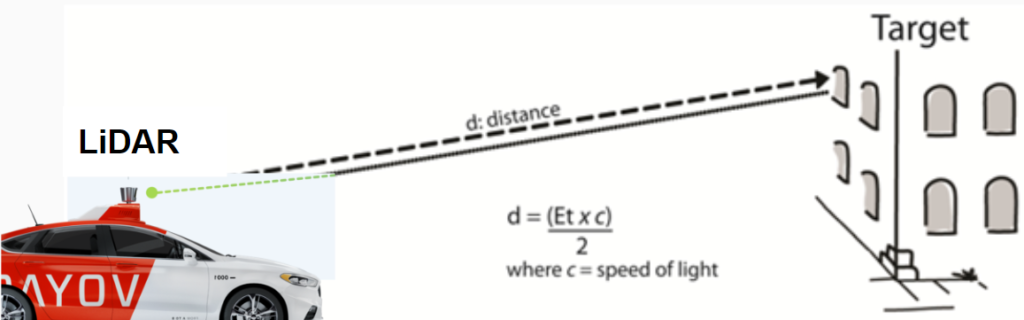
LiDAR, which stands for “Light Detection and Ranging,” is a technology that uses lasers to measure distances and create detailed 3D maps of objects and environments. Lidar is commonly used in robotics, as it allows robots to navigate and interact with their surroundings with a high degree of accuracy and precision.
To visualize these common issues, we’ve summarized findings from a common LiDAR supplier named Robosense.
What are LiDAR Ghosts?
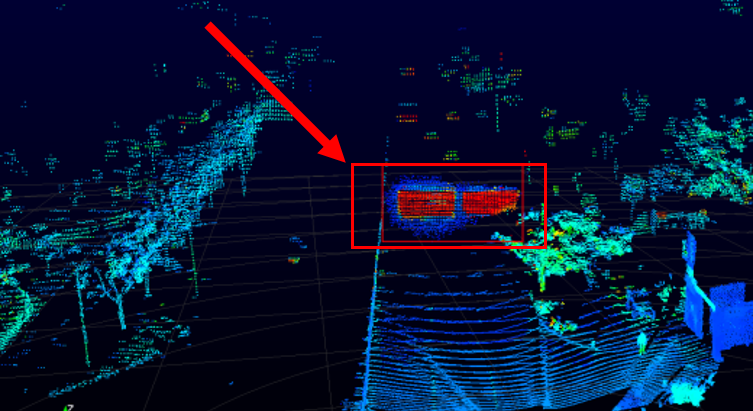
One potential issue with using lidar in robotics is the phenomenon known as “lidar ghosts.” Lidar ghosts are false readings or artifacts that appear in lidar data, caused by reflections or scattering of the laser beams. These false readings can create distorted or misleading images of the environment, which can potentially lead to incorrect decisions or actions by the robot. In the example below, a highly reflective stop sign (in red on the left side of the image) causes there to be stop-sign shaped “ghosts” in the returned lidar ray data. These ghosts do not reflect real objects in space, but false readings generated from reflections from the stop sign:
These ghosts can be a problem, as robots rely on these sensors to provide accurate information on the environment to operate in a safe manner. If a self driving car received point cloud range information indicating an object in the road, it would have to break, as it would not be able to distinguish the “ghost” data from real life without another sensor (i.e camera). If there were no LiDAR ghosts, the same scene above would appear “correctly” below:
LiDAR ghosts are possible due to the physics behind reflections of the laser light rays that LiDAR sensors rely on for data:
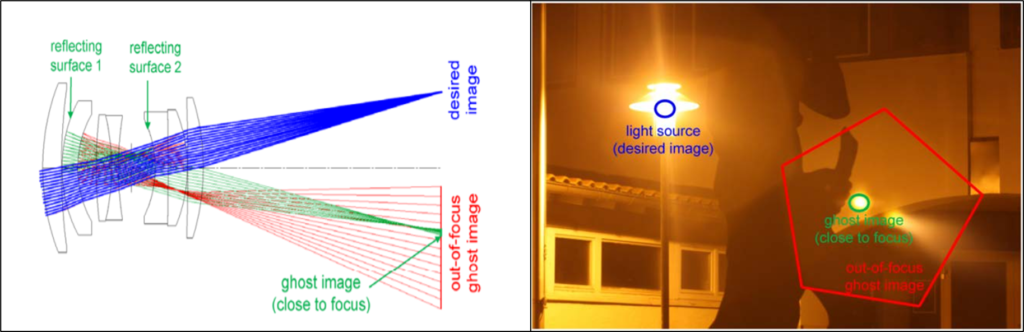
This causes the sensor to receive additional “ghost” reflected lights in addition to the original light rays.
What is LiDAR blooming?
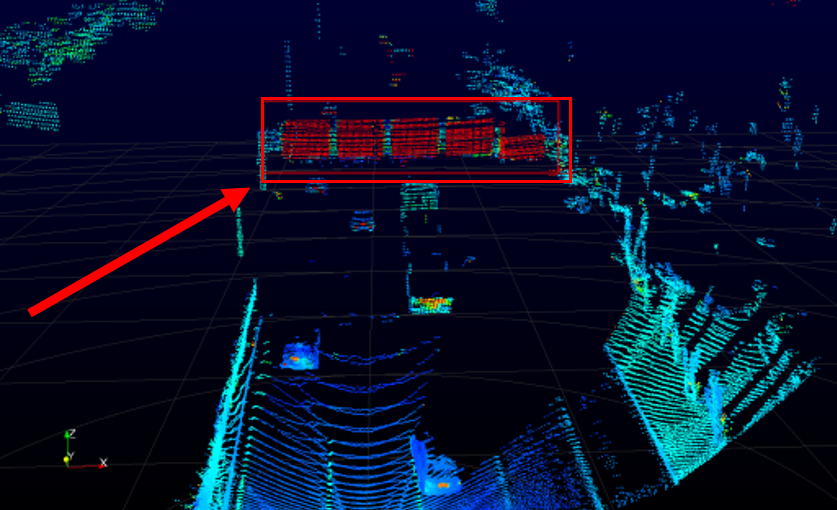
Another challenge with using lidar in robotics is “lidar blooming.” Lidar blooming occurs when the laser beam from a lidar system is reflected or scattered back to the sensor by a particularly bright or reflective object, such as a car with a shiny paint job. This can cause the lidar sensor to become overwhelmed, resulting in distorted or incomplete data. The “blooming” refers to the appearance of the dilated point cloud data, where the size of objects increase incorrectly (appear to “bloom”) as seen in the light blue points around the red shaped sign below:
Without the effects of “blooming”, more accurate data would appear as:
Getting accurate LiDAR point cloud data without blooming is important because it is common to attempt to classify objects found within the point clouds, and the shape of these objects would be important for classification.
To address these challenges, researchers and engineers are developing advanced algorithms and techniques to improve the accuracy and reliability of lidar data in robotics applications. For example, they are working on methods to filter out false readings and correct for blooming effects, to enable robots to make more informed and accurate decisions.
LiDAR is a valuable technology for robotics, as it allows robots to perceive and navigate their environments with high precision. However, lidar ghosts and blooming can introduce errors and distortions into lidar data, requiring careful algorithms and techniques to overcome these challenges. By addressing these issues, lidar has the potential to greatly improve the capabilities of robots in a wide range of applications.
To learn more about LiDAR, check out our post on how do robots see? To learn more about the limitations of LiDAR, check out our post on why don’t robots like shiny black floors?



