
Calibrating sensors in robotics is an essential step that ensures the accuracy and reliability of the data collected by these sensors. Proper calibration allows sensors to accurately measure and interpret the environment, which is critical for enabling robots to navigate, interact, and make decisions.
One of the key reasons for calibrating sensors in robotics is to account for variations and errors in the sensor hardware. Sensors are complex devices that can be affected by various factors, such as temperature, humidity, and physical wear and tear. Over time, these factors can cause sensors to drift from their intended accuracy, resulting in incorrect or misleading data. Calibrating sensors regularly helps to compensate for these variations and errors, ensuring that the data collected by the sensors is accurate and reliable.
Another important reason for calibrating sensors in robotics is to account for changes in the environment. The environment in which a robot operates can vary greatly, both in terms of the physical characteristics of the environment and the objects and obstacles that the robot encounters. Calibrating sensors allows the robot to adapt to these changes, ensuring that it can accurately measure and interpret its surroundings.
Calibrating sensors in robotics is essential for ensuring the accuracy and reliability of the data collected by these sensors. Proper calibration allows robots to navigate, interact, and make decisions based on accurate and up-to-date information about their environment, improving their overall performance and capabilities.
Lets look at some real life calibration examples. In robot systems with cameras, we often want to calibrate something known as an intrinsic and extrinsic matrix that makes the camera image to the real scene it captured. This allows us to determine where an object in our frame is in real life, relative to the position in which the camera is mounted. This calibration is done usually with data from another sensor to use as an anchor point to map the image:
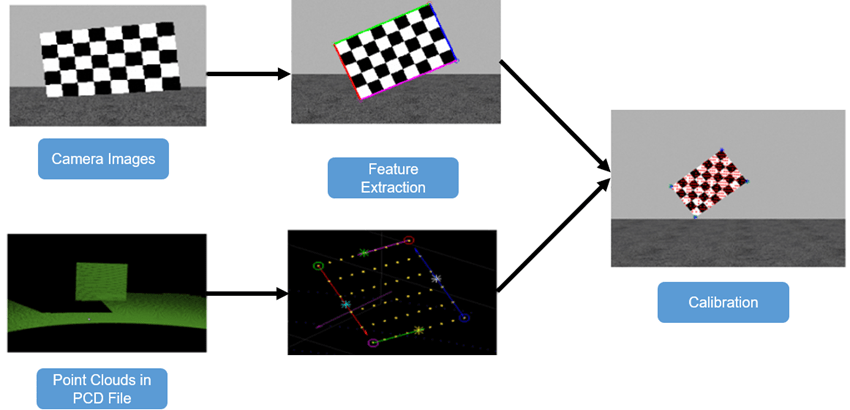
Another common robotic sensor, the LiDAR, is calibrated by analyzing the data returned by the LiDAR, and comparing it to known values in real life by taking real life measurements, or using a “calibration booth” where distances between real life objects are known. It is common to calibrate the angle of the LiDAR, as that would affect where different LiDAR rays return from objects. The calibration is done to ensure the data the LiDAR returns is accurate, so objects detected by the LiDAR have their positions accurately reported to real life:
For more information on sensors in robotics, check out our post on how robots experience the world.



